
数学物理方程模型前言
介绍
《数学物理方程》是数学领域偏微分方程方向的最基本的入门课程。
数学物理以研究物理问题为目标的数学理论和数学方法。它探讨物理现象的数学模型,即寻求物理现象的数学描述,并对模型已确立的物理问题研究其数学解法,然后根据解答来诠释和预见物理现象,或者根据物理事实来修正原有模型。
“数理”也叫“数学物理”,是数学和物理学的交叉领域,指应用特定的数学方法来研究物理学的某些部分。对应的数学方法也叫数学物理方法。
所以说,使用数学语言描述物理现象的方程就是数学物理方程,通常是反映物理量之间关系的偏微分方程,积分方程或常微分方程。这些方程帮助我们理解自然现象的规律性,并且为科学研究提供了工具。
偏微分方程理论:
- 主要研究具有实际背景的偏微分方程或偏微分方程组,是数学的基础学科之一,在数学领域占据着核心地位。
- 涉及领域十分广泛:如物理、力学、化学、生物、经济等自然科学、社会科学和工程技术领域,还与其他数学分支有紧密的联系。
- 近年来偏微分方程也应用于计算机图像处理及金融、保险等领域。
数学物理方程具有如下特点
- 数学理论、解题方法与物理实际有机结合 可以学到:如何根据物理现象建立偏微分方程模型及寻找求解方法,并用偏微分方程有关理论来解释物理现象。
- 需要综合应用多门数学学科知识 可以巩固、复习有关数学学科知识,提高综合运用这些知识的能力,如《数学分析》《常微分方程》《线性代数》《复变函数》《实变函数与泛函分析》等。
数学物理方程的研究方法
如何从物理的实际问题中导出数理方程呢?基本步骤如下 $$ 物理模型\xrightarrow{定量化}数学模型 $$
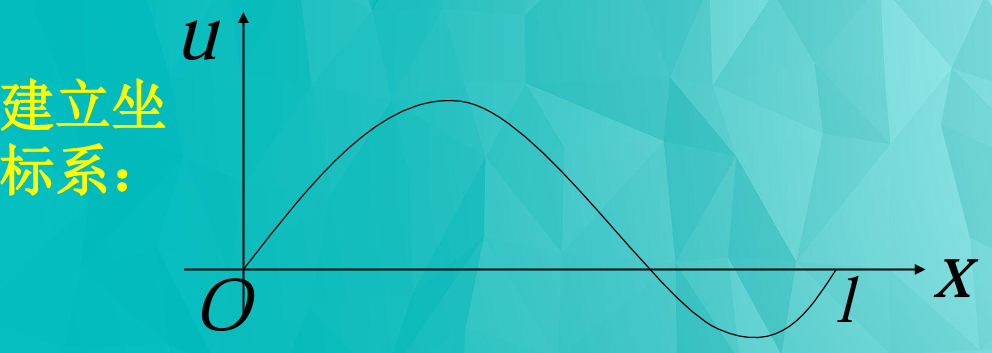
- 建立坐标系
- 选择表征所研究过程的物理量,因为表征物理量的选择常常是建立一个新方程的起点
- 寻找(嗯猜)物理过程所遵守的物理定律或者物理公理
- 写出物理定律的表达式,即数学模型
而数学物理方程的研究方法的一般步骤:
- 将物理问题归结为数学上的定解问题;
- 求解定解问题;
- 对求得的解给出物理解释。
研究内容 - 适定性的概念:
- 存在性:解是否存在。
- 唯一性:解是否唯一。
- 稳定性:解是否稳定。
如果一个定解问题的解是存在的、唯一的,而且是稳定的,则称该定解问题是适定的。
基本概念
偏微分方程(PDE):含有两个或两个以上自变量和未知函数以及未知函数的偏导数的关系式(含有多元未知函数的偏导数的方程)。
数学物理方程:从物理、力学等实际问题中产生的函数方程,主要是偏微分方程或积分方程。
偏微分方程的阶:方程中出现的未知函数最高阶偏导数的阶。
线性偏微分方程:,且方程中的系数都仅依赖于自变量(或者是常数),那么这样的偏微分方程就称为线性偏微分方程,特别的,如果方程中的系数都是常数,则称为常系数偏微分方程。
非线性偏微分方程:非线性偏微分方程是各阶微分项有次数高于一的微分方程即为非线性偏微分方程,其实也就是不是线性的偏微分方程
两个自变量的二阶线性偏微分方程的一般形式 a11uxx + 2a12uxy + a22uyy + b1ux + b2uy + cu + f = 0 其中,aj = aj(x, y), bj = bj(x, y), c = c(x, y), f = f(x, y)为已知函数。
- 如果f = 0,则称上述方程为齐次方程;否则为非齐次方程。
- ut − uux = 0:1 阶非线性 PDE(激波方程)
- 两个自变量的二阶 PDE 一般形式:F(x, y, u, ux, uy, uxx, uxy, uyy) = 0
阶线性 PDE 示例:
- 波动方程:utt − a2uxxx = f(x, t)
- 热传导方程:ut − a2uxxx = f(x, t)
- 位势方程:−(uxx + uyy) = f(x, y)
弦振动方程与定解条件
引入
演奏弦乐(二胡,提琴)的人用弓在弦上来回拉动,弓所接触的是弦的很小的一段,似乎只能引起这个小段的振动,实际上振动总是传播到整个弦,弦的各处都振动起来。
弦振动方程是在 18 世纪由达朗贝尔等人首先给予系统研究的。它是一大类偏微分方程的典型代表。
以弦振动为例进行物理问题的分析
物理问题提法
一根拉紧的均匀柔软的细弦,两端固定,长为 l,在垂直于弦线的外力的作用下,弦在平衡位置附近作微小的横振动 - 振动方向与弦的平衡位置垂直。研究弦上各点在不同时刻的运动规律。
数学提法
建立坐标系:弦的平衡位置为 x 轴,两端分别固定在 x = 0 和 x = l 处。u(x, t)表示弦上横坐标为x的点在时刻t时沿垂直于 $ x$ 轴方向的位移,求u(x, t)。
分析(理想化假设)
将实际问题归结为数学模型时,必须作一些理想化的假设,以便抓住问题的最本质的特征。在考察弦振动问题时的基本假设为:
- 弦是均匀的,弦的截面直径与弦的长度相比可以忽略,弦的线密度 ρ 是常数。
- 弦是柔软的,它在形变时不抵抗弯曲,弦上各质点间的张力方向与弦的切线方向一致,而弦的伸长形变与张力的关系服从胡克(Hooke)定律(即指在弹性限度内,物体的形变跟引起形变的外力成正比)。
- 弦在某一平面内作微小横振动:即弦的位置始终在一直线段附近(平衡位置),而弦上各点均在同一平面内垂直于该直线的方向上作微小振动(|ux| < < 1)(弦上一点的切线和横轴的夹角很小)。
- 注意:弦是柔软的时候,也就是在放松的条件下,把弦弯成任意的形状,它都保持静止,绷紧后,相邻小段之间才开始有拉力,这种拉力就是弦中的张力,张力沿切线的方向。由于张力的作用,一个小段的振动必带动它的邻段,邻段又带动它自己的邻段,这样一个小段的振动必然传播到整个弦,这种振 动的传播现象叫作波。
受力分析:
为了求弦上任意一点的运动规律,在弦上任取一小弦弧$\widehat{M_1M_2}$进行考察。
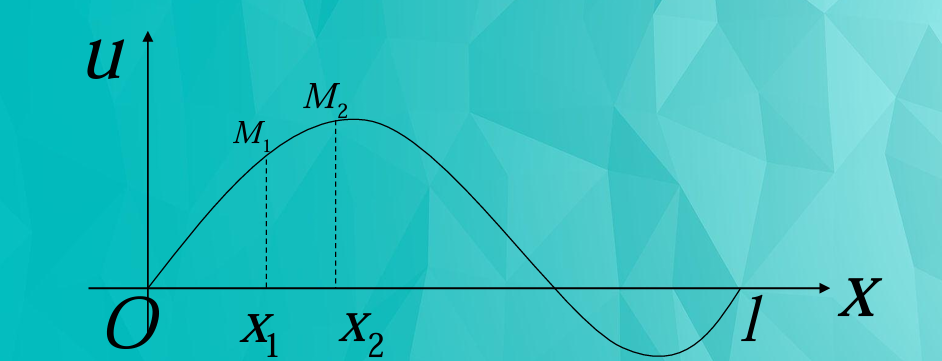
(我们首先证明张力为常数(即与位置和时间 无关)。假设$\widehat{M_1M_2}$的弧长为Δs )
利用弧长公式可知: $$ \Delta s=\int_{x_1}^{x_2}\sqrt{1 + u_x^2}dx $$
$$ u_x=\frac{\partial u}{\partial x} $$
由假定,弦只作微小振动,ux2与 1 相比可以忽略不计,从而Δs ≈ x2 − x1,可以认为这段弦在振动过程中并未伸长,因此由胡克定律知道,弦上每一点所受的张力在运动过程中保持不变,即张力与时间无关。接下来, 我们只须说明张力与位置 x 无关。
弦只作横向振动,张力在 x 轴方向分量的代数和为零,即:
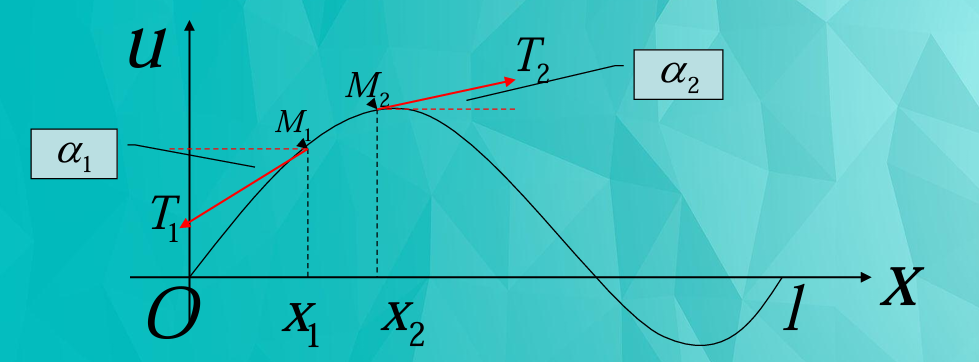 T2cos α2 − T1cos α1 = 0
由于小振动: α1 → 0, α2 → 0, cos α1 → 1, cos α1 → 1
于是上式可以写成T1 = T2,即张力也不随位置而异,综上,张力是常数,记作T
T2cos α2 − T1cos α1 = 0
由于小振动: α1 → 0, α2 → 0, cos α1 → 1, cos α1 → 1
于是上式可以写成T1 = T2,即张力也不随位置而异,综上,张力是常数,记作T
结合分析进行数学物理方程的导出
回顾一下动量守恒定律:物体在某一时段内动量的增量等于作 用在该物体上所有外力在该时段内所产生冲量
所以,下面使用动量守恒定律推导一维弦振动方程:
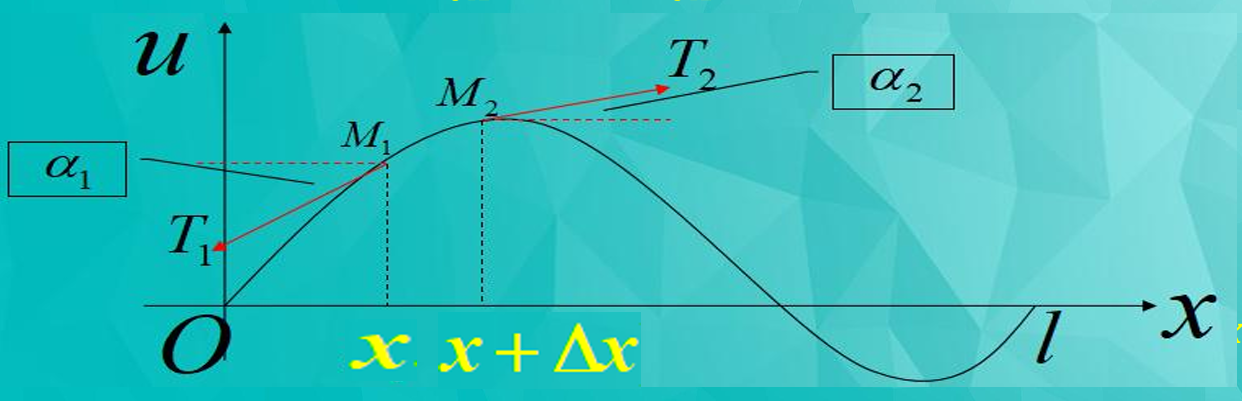
在弦上任取小段 [x, x + Δx],考察弦段在 [t, t + Δt] 时段内冲量和动量的变化情况
结合动量守恒,有: 动量|t = t + Δt − 动量|t = t = 所有外力产生的冲量|[t, t + Δt] 动量微元为 ρv(x, t)dx 冲量微元为 F(x, t)dt
情形一:弦不受外力作用时
动量守恒:动量的变化量等于所有外力产生的冲量。
一方面,计算动量守恒公式左边动量的变化量:
在 t 时刻弦段 [x, x + Δx] 的动量为 $$ \int_{x}^{x+\Delta x} \rho \frac{\partial u(x, t)}{\partial t} dx $$ 在 t + Δt 时刻弦段 [x, x + Δx] 的动量为 $$ \int_{x}^{x+\Delta x} \rho \frac{\partial u(x, t+\Delta t)}{\partial t} dx $$ 所以,从时刻 t 到时刻 t + Δt 弦段 [x, x + Δx] 的动量增加量为 $$ \int_{x}^{x+\Delta x} \rho \left[ \frac{\partial u(x, t+\Delta t)}{\partial t} - \frac{\partial u(x, t)}{\partial t} \right] dx $$ 另一方面,计算动量守恒公式中右边弦段 [x, x + Δx] 所受外力在时段 [t, t + Δt] 产生的冲量
对于弦段 [x, x + Δx]
张力在 x 轴的垂直方向的合力为
$$
\begin{aligned}
&= T \frac{\partial u(x+\Delta x, t)}{\partial x} - T
\frac{\partial u(x, t)}{\partial x} \\
&= T \left[ \frac{\partial u(x+\Delta x, t)}{\partial x} -
\frac{\partial u(x, t)}{\partial x} \right]
\end{aligned}
$$ 
$$ \int_{t}^{t+\Delta t} \int_{x}^{x+\Delta x} T \frac{\partial^2 u(x, t)}{\partial x^2} dxdt = \int_{x}^{x+\Delta x} \int_{t}^{t+\Delta t} \rho \frac{\partial^2 u(x, t)}{\partial t^2} dtdx \tag{1.1} $$
即 $$ \int_{t}^{t+\Delta t} \int_{x}^{x+\Delta x} T \frac{\partial^2 u(x, t)}{\partial x^2} dxdt = \int_{t}^{t+\Delta t} \int_{x}^{x+\Delta x} \rho \frac{\partial^2 u(x, t)}{\partial t^2} dxdt $$ 由 Δx, Δt 的任意性知 $$ \rho \frac{\partial^2 u(x, t)}{\partial t^2} - T \frac{\partial^2 u(x, t)}{\partial x^2} = 0 $$
或者 $$ \frac{\partial^2 u(x, t)}{\partial t^2} - a^2 \frac{\partial^2 u(x, t)}{\partial x^2} = 0, \tag{1.2} $$ 其中 $a^2 = \frac{T}{\rho} > 0$
这就是不受外力作用下的弦振动所满足的方程!
情形二:存在外力作用时
设作用在点 x 处的外力线密度为 F(x, t),其方向垂直于 x 轴
则在小段弦[x, x + Δx]所受的外力为 ∫xx + ΔxF(x, t)dx 其在时段[t, t + Δt] 产生的冲量为 ∫xx + Δx∫tt + ΔtF(x, τ)dτdx 于是上述的方程的左端应该增加这一项,得到 $$ \int_{t}^{t+\Delta t} \int_{x}^{x+\Delta x} \left[ T \frac{\partial^2 u(x, t)}{\partial x^2} - \rho \frac{\partial^2 u(x, t)}{\partial t^2} + F(x, t) \right] dxdt = 0 $$
这样外力作用下的弦振动方程为 $$ \frac{\partial^2 u(x, t)}{\partial t^2} - a^2 \frac{\partial^2 u(x, t)}{\partial x^2} = f(x, t), \tag{1.3} $$
其中 $f = \frac{F}{\rho}$ 表示单位质量在 x 点处时刻 t 所受的外力。
总之:
无外力作用的弦振动方程: $$ \frac{\partial^2 u}{\partial t^2}-a^2\frac{\partial^2 u}{\partial x^2}=0 $$
外力作用下的弦振动方程: $$ \frac{\partial^2 u}{\partial t^2}-a^2\frac{\partial^2 u}{\partial x^2}=f(x,t) $$ 其中 f 称为非齐次项。
弦振动方程也叫波动方程,因为它描述的是一种振动或波动现象。
类似地,可以推导二维波动方程(如薄膜振动)和三维波动方程(如电磁波、声波的传播等),形式分别为:
二维: $$ \frac{\partial^2 u}{\partial t^2}=a^2\left(\frac{\partial^2 u}{\partial x^2}+\frac{\partial^2 u}{\partial y^2}\right)+f(x,y,t) $$
三维 $$ \frac{\partial^2 u}{\partial t^2}=a^2\left(\frac{\partial^2 u}{\partial x^2}+\frac{\partial^2 u}{\partial y^2}+\frac{\partial^2 u}{\partial z^2}\right)+f(x,y,z,t) $$
一般地,n 维波动方程可写为: $$ \frac{\partial^2 u}{\partial t^2}=a^2\Delta u + f(x,t) $$ 其中 $$ \Delta=\sum_{i = 1}^n\frac{\partial^2}{\partial x_i^2} $$ 表示 n 维拉普拉斯算子。
推导定解条件
对于一个确定的物理过程,仅建立表征该过程的物理量 u 所满足的方程还是不够的,还要附加 一定的条件,这些条件应该恰恰足以说明系统的初始状态以及边界上的物理情况。
所以说,定解条件包括 初始条件 和 边界条件
初始条件:表征某过程“初始”时刻状态的条件。 对于弦振动问题来说,初始条件指的是弦在 “初始”时刻的位移和速度 $$ \begin{cases} \left.u\right|_{t = 0}=\varphi(x)&\text{初始位移}\\ \left.\frac{\partial u}{\partial t}\right|_{t = 0}=\psi(x)&\text{初始速度} \end{cases} $$
边界条件:表征某过程的物理量在系统的边界上 所满足的物理条件。
对于弦振动问题而言,有三种基本类型:
第一类边界条件(狄利克雷 Dirichlet)
弦的一端的运动规律已知,以 x = 0 为例,若以 μ1(t)表示其运动规律,则边界条件可以表达为: u|x = 0 = μ1(t) 为非齐次边界条件;
特别地,若 u|x = 0 = 0 为齐次边界条件。
第二类边界条件(诺伊曼 Neumann)
若弦的一端(例如 )在垂直于 轴的直线 上自由滑动,且不受到垂直方向的外力,这种边界称为自由边界
根据边界微元右端的张力沿垂直方向的分量是$T_0 \frac{\partial u}{\partial x}$
得出,若弦的一端自由滑动且不受垂直方向外力,在自由边界成立如下 $$ \left.\frac{\partial u}{\partial x}\right|_{x = 0}=0 $$ 为齐次边界条件。
若边界张力沿垂直方向分量是 t的一个已知函数, 则相应的边界条件为 $$ \left.\frac{\partial u}{\partial x}\right|_{x = 0}=\mu_2(t) $$ 为非齐次边界条件;
第三类边界条件(鲁宾 Robin)
若弦的一端(例如x = l)固定在弹性支承上,并且弹性支承的伸缩符合胡克定律,若支承的位置为 u = 0,则在 u 端点的值表示支承在该点的伸长。弦对支承拉力的垂直方向分量为$-T_0 \frac{\partial u}{\partial x}$
由胡克定律得 $$ -\left.T_0\frac{\partial u}{\partial x}\right|_{x = l}=\left.k u\right|_{x = l} $$ 因此,在弹性支承的情况下,边界条件如下 $$ \left.\left(\frac{\partial u}{\partial x}+\alpha u\right)\right|_{x = l}=0 $$ 为齐次边界条件,其中$\alpha=\frac{k}{T_0}$是已知正数。
更普遍的非齐次边界条件为,其中μ3(t)是 t 的已知函数 $$ \left.\left(\frac{\partial u}{\partial x}+\alpha u\right)\right|_{x = l}=\mu_3(t) $$
解决定解问题
上面我们说了,定解条件(从方程中确定解的条件):初始条件和边界条件的统称
定解问题就是由偏微分方程和定解条件联立所得到的问题
弦振动方程的初边值问题 (也叫混合问题):
弦振动方程+两个初始条件+ 边界条件
弦振动方程的第一初边值(Dirichlet)问题: $$ \begin{cases} \frac{\partial^2 u}{\partial t^2} - a^2 \frac{\partial^2 u}{\partial x^2} = f(x, t), & 0 \leq x \leq l,\ t > 0, \\ u(x, 0) = \varphi(x),\ u_t(x, 0) = \psi(x), & 0 \leq x \leq l, \\ u(0, t) = g_1(t),\ u(l, t) = g_2(t), & t \geq 0. \end{cases} $$
弦振动方程的第二初边值(Neumann)问题: $$ \begin{cases} \frac{\partial^2 u}{\partial t^2} - a^2 \frac{\partial^2 u}{\partial x^2} = f(x, t), & 0 \leq x \leq l,\ t > 0, \\ u(x, 0) = \varphi(x),\ u_t(x, 0) = \psi(x), & 0 \leq x \leq l, \\ -\frac{\partial u(0, t)}{\partial x} = g_1(t),\ \frac{\partial u(l, t)}{\partial x} = g_2(t), & t \geq 0. \end{cases} $$
弦振动方程的第三初边值(Robin)问题 $$ \begin{cases} \frac{\partial^2 u}{\partial t^2} - a^2 \frac{\partial^2 u}{\partial x^2} = f(x, t), & 0 \leq x \leq l,\ t > 0, \\ u(x, 0) = \varphi(x),\ u_t(x, 0) = \psi(x), & 0 \leq x \leq l, \\ \left. \left( -\frac{\partial u}{\partial x} + \alpha u \right) \right|_{x=0} = g_1(t),\ \left. \left( \frac{\partial u}{\partial x} + \alpha u \right) \right|_{x=l} = g_2(t), & t \geq 0. \end{cases} $$
弦振动方程的初值问题(也叫柯西(Cauchy)问题):方程+初始条件 $$ \begin{cases} \frac{\partial^2 u}{\partial t^2} - a^2 \frac{\partial^2 u}{\partial x^2} = f(x, t), & -\infty < x < +\infty,\ t > 0, \\ u(x, 0) = \varphi(x),\ u_t(x, 0) = \psi(x), & -\infty < x < +\infty. \end{cases} $$ 混合问题和柯西问题是两类基本的定解问题





